
来源:互联网 编辑:上海开太泵业有限公司
1 广义空耗与节能效果
1.1 供水系统的主要参数
供水系统的管路是非循环型的,即用户用过的水并不返回到水泵的入口,如图1所示。在供水系统中,水泵的作用主要是:
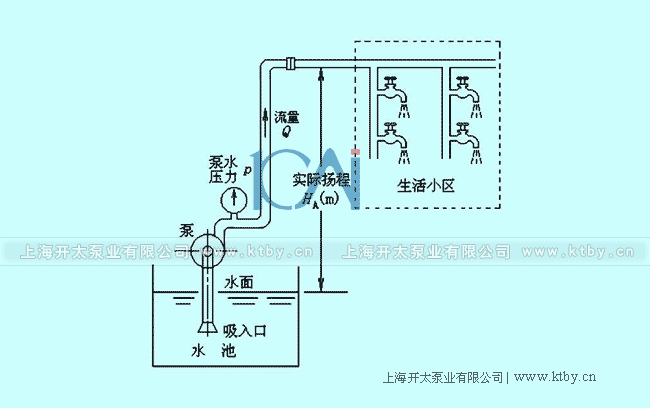
图1 供水系统的基本模型
(1) 提高水位,即把较低水位的水上扬至一定高度。
(2) 根据用户对用水的需求,控制水的流速。
1.2 供水系统的主要参数如下
(1) 流量
流量是单位时间内流过管道内某一截面的水流量,在管道截面不变的情况下,其大小决定于水流的速度。符号是Q,常用单位是m3/s。流 量是管道系统的基本控制对象。
(2) 扬程
扬程是单位重量的水通过水泵所获得的能量,符号是H。因为在工程应用中,常常体现为液体上扬的高度,故常用单位是m。
(3) 实际扬程
供水系统中,为了提供一定流量所实际需要的扬程,称为实际扬程,符号是ha。在图1中,ha体现为从水平面到管路最高处之间的扬程。 实际扬程是管道系统供水时必须克服的最小扬程,或者说,水泵只有在克服了实际扬程后,才能向用户供水。
(4) 损失扬程
符号是hl,主要包括两个部分:
供水时克服各部分管道内的磨擦损失和其他损失所需要的扬程;
为了使水流具有一定的流速所需要的扬程。
(5) 空载扬程
当管道内的流量趋近于零时,所能达到的最高扬程,符号是h0。
(6) 管阻
管阻是阀门和管道系统对水流的阻力,符号是r。因为不是常数,难以简单地用公式来定量地计算,通常用扬程与流量间的关系曲线来描 述,故对其单位常不提及。
1.3 供水系统的特性
1.3.1 扬程特性
(1) 定义
以管路中的阀门开度不变为前提,表明在某一转速下,扬程与流量间关系的曲线ht=f(q),称为扬程特性曲线,如图2(a)所示。
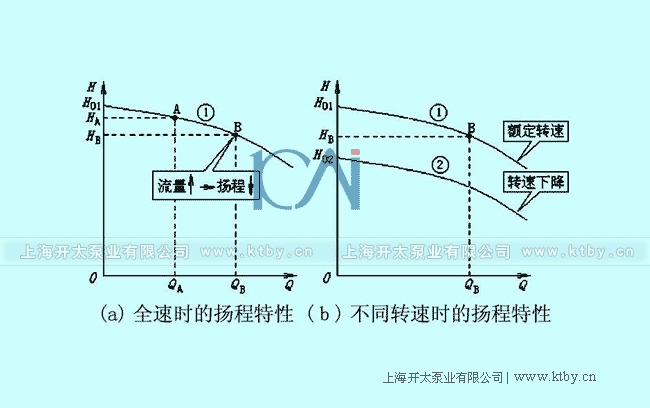
图2 供水系统的扬程特性
(2) 物理意义
用户用水越多(流量越大),管道中的磨擦损失以及提高流量所需的扬程也越大,供水系统的总扬程则越小。
(3) 扬程特性与转速有关
水泵的转速下降,其空载扬程也下降,扬程特性将下移,如图2(b)所示。
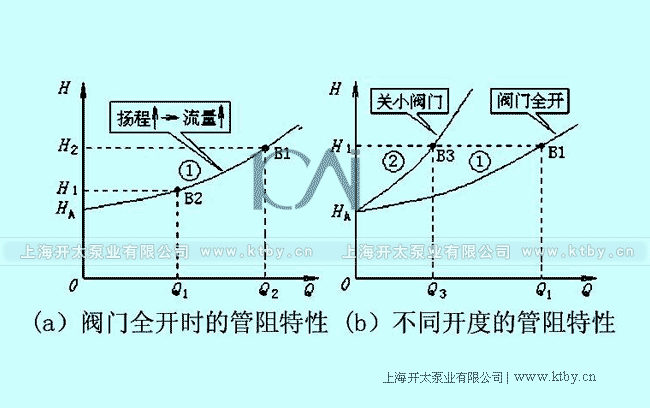
图3 供水系统的管阻特性
1.3.2管阻特性
(1) 定义
以水泵的转速不变为前提,表明阀门在某一开度下,扬程与流量间关系的特性曲线ht=f(q),称为管阻特性曲线,如图3(a)所示。
(2) 物理意义
管阻特性表明了管阻对流量的影响。即:流量越大,克服管阻所需的扬程也越大,故总扬程越大。
管阻特性的起始扬程等于实际扬程(ha)。其物理意义是:如果总扬程小于实际扬程的话,将不足以克服管路的管阻,从而不能供水。因此 ,实际扬程也是能够供水的“基本扬程”。
(3)管阻特性与阀门的开度
当阀门关小时,管阻增大,克服管阻所需的扬程也增大,故管阻特性将上扬,如图3(b)所示。
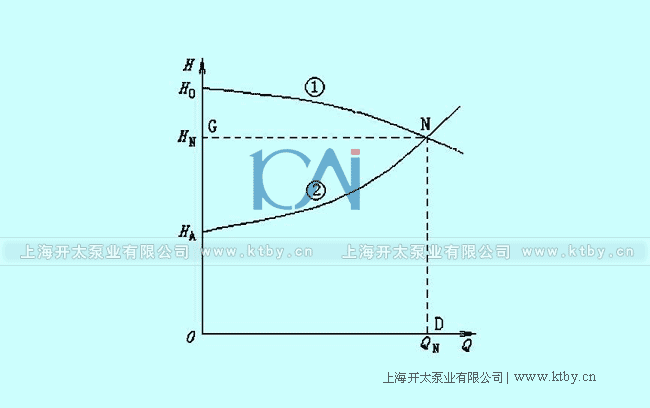
图4 供水系统的工作点
1.3.3 供水系统的工作点
扬程特性曲线和管阻特性曲线的交点,称为供水系统的工作点,如图4中之n点。在这一点:供水系统既满足了扬程特性,也符合了管阻特 性。供水系统处于平衡状态,系统稳定运行。这时,流量为qn,扬程为hn。
1.3.4 流体功率
管道系统向用户供水时所消耗的功率pg称为流体功率,也是水泵的输出功率。流体功率与流量和扬程的乘积成正比:
pg=kphg·qg (1)
式中,pg—流体功率,kw;
hg—供水扬程,m;
qg—供水流量,m3/min;
kp—比例常数。
由图4可以看出:流体功率与面积odng成正比。
1.4 调节流量的方法与比较
1.4.1 阀门控制法
即通过关小或开大阀门来调节流量,而转速则保持不变(通常为额定转速)。阀门控制法的实质是水泵本身的供水能力不变,而是通过改变 管路中的管阻大小来“强行”改变流量,以适应用户对流量的需求。这时,管阻特性将随阀门开度的改变而改变,但扬程特性则不 变。
设用户所需流量由qn减小为qb,当通过关小阀门来实现时,管阻特性将改变为曲线③,而扬程特性则仍为曲线①,故供水系统的工作点移 至b点,如图5所示。
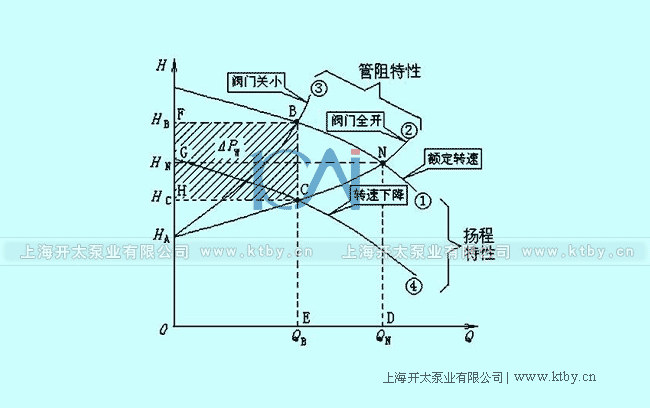
图5 调节流量的方法与比较
流量减小为qb;扬程则上升为hb;由式(1)知,供水功率pb与面积oebf成正比。
阀门控制时,供水系统的工作点是在额定转速的扬程特性上移动的。
1.4.2转速控制法
即通过改变水泵的转速来调节流量,而阀门开度则保持不变(通常为最大开度)。
转速控制法的实质是通过改变水泵的供水能力来适应用户对流量的需求。当水泵的转速改变时,扬程特性将随之改变,而管阻特性则不变 。
仍假设用户所需流量由qn减小为qb,当转速降低时,扬程特性下降为曲线④,管阻特性则仍为曲线②,工作点移至c点。
这时,流量也减小为qb;扬程减小为hc;供水功率pc与面积oech成正比。
转速控制时,供水系统的工作点是在最大开度的管阻特性上移动的。
1.4.3 两种方法的比较
比较上述两种调节流量的方法,可以看出:在所需流量小于额定流量的情况下,转速控制时的扬程比阀门控制时小得多,两者之差为 δh,所以转速控制方式所需的供水功率也比阀门控制方式小得多。两者之差δp便是转速控制方式节约的供水功率,它与面积hcbf( 图中的阴影部分)成正比。这是变频调速供水系统具有节能效果的最基本的方面。
1.5流体功率的基本功耗
1.5.1基本功耗的概念
如图6,供水系统向用户供水时所消耗的流体功率pg与面积odng成正比。
其中,与实际扬程对应的功率pa与面积odea成正比。pa的物理意义是:克服实际扬程所消耗的功率。
为了能向用户供水,水泵的输出功率必须大于pa。或者说,水泵输出功率中,大于pa的部分,才是用户得到的流体功率。因此,pa是管路 系统的基本功耗。
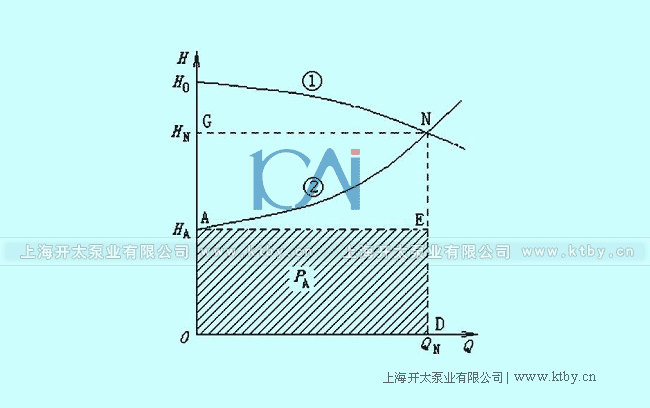
图6 供水系统的工作点
1.5.2 基本功耗对节能效果的影响
比较图7的(a)和(b),可以清楚地看出:在所需流量相同的情况下,实际扬程小者,基本功耗也小,节能效果较好;反之,实际扬程大者, 基本功耗也大,节能效果较差。
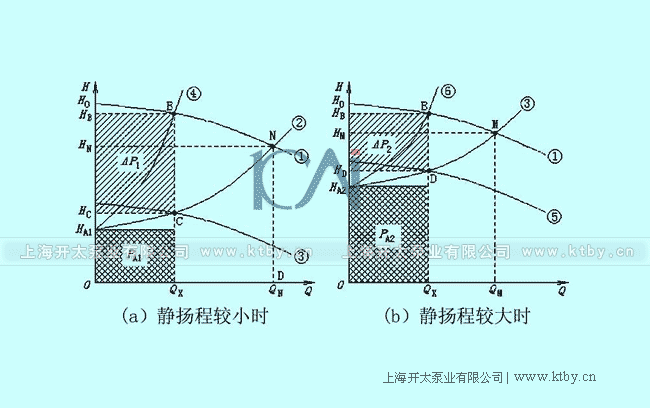
图7 实际扬程对节能效果的影响
1.5.3 供水系统的典型例子
供水管路的类型很多,难以尽述。这里只根据实际扬程的大小,讨论两种比较典型的情形:
(1) 高楼供水
这是许多民用建筑的特点,如图8(a)所示。供水系统的特点是:实际扬程ha1较大,其管阻特性如图8(b)中之曲线②所示。
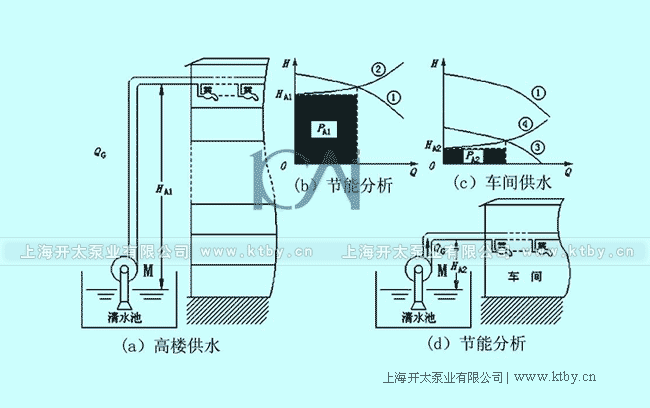
图8 供水泵站的特点
由图8可知,其转速调节的范围较小,且基本功率所占比例较大,采用变频调速后的节能空间有限。
(2) 车间供水
大多数工厂的车间都是低层建筑,如图8(d)所示。供水系统的特点是:实际扬程ha2较小,其管阻特性如图8(c)中之曲线④所示,与高楼供 水相比, 转速调节的范围较大,基本功率所占比例较小,采用变频调速后的节能效果比较显著。
2 水泵的输入与输出功率
2.1 水泵的机械特性
2.1.1 机械特性方程
迄今为止,国内外学者公认的离心式水泵的机械特性方程是:
tl=t0+ktnl2 (2)
式中,tl—水泵的负载转矩,n·m;
t0—水泵的空载转矩,n·m;
kt—转矩比例常数;
nl—水泵的转速,r/min。
式(2)中的空载转矩主要包括:电动机本身的摩擦转矩和通风转矩、传动机构的损耗转矩和水泵的摩擦转矩等。由于所占比例较小,在粗略 估算时可以忽略不计,而有:
tl≈ktnl2 (3)
所以,离心式水泵常被称为二次方律负载。
离心式水泵的机械特性曲线如图9(a)所示。
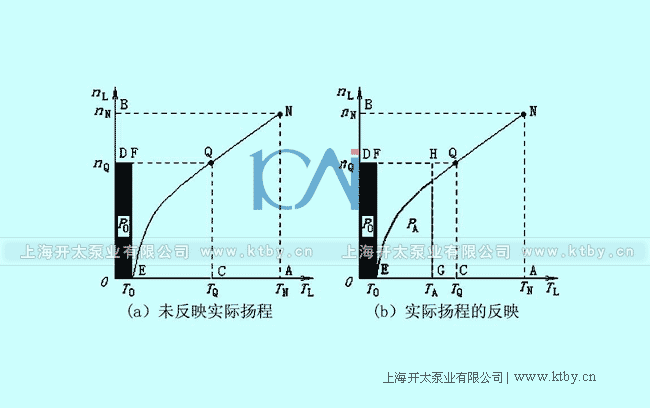
图9 离心式水泵的机械特性曲线
2.1.2 实际扬程在机械特性中的反映
水泵轴上输入的是机械功率,正比于转矩和转速的乘积:
pl (4)
式中,pl—电动机输出的轴功率,也是水泵的输入功率kw。
将式(2)代入式(4),得:
pl==+=p0+kp nl3 (5)
式中,p0—空载功率,kw;
kp—功率比例常数。
如果将p0忽略不计,则轴功率可粗略地表示为:
pl≈kp nl3 (6)
在图9中,当转速nl=nq时,轴功率与面积ocqd成正比,其中,空载功率与面积oefd成正比。
在管路中,必有一部分转矩(ta-t0)用来克服实际扬程ha,所以,基本功耗pa便与面积eghf成正比,如图9(b)所示。
2.1.3 广义的空载功率
就供水系统而言,基本功耗pa实际上是并不真正供水前的损耗,广义地说,也是一种空载损耗。所以,作为一个管道供水的拖动系统来说 ,存在着一个广义的空载损耗:
p0a=p0+pa (7)
式中,p0a—供水管路中的广义空载损耗kw。
广义空载损耗的实质,是供水管路中的基本损耗对轴功率的一种反馈。因此,简单地用(3)和式(6)来说明水泵的节能效果,是有失偏颇的 。
2.2 水泵输入和输出功率的差异
2.2.1 流体功率节能效果的规律
流体功率节能效果的规律如图10所示。
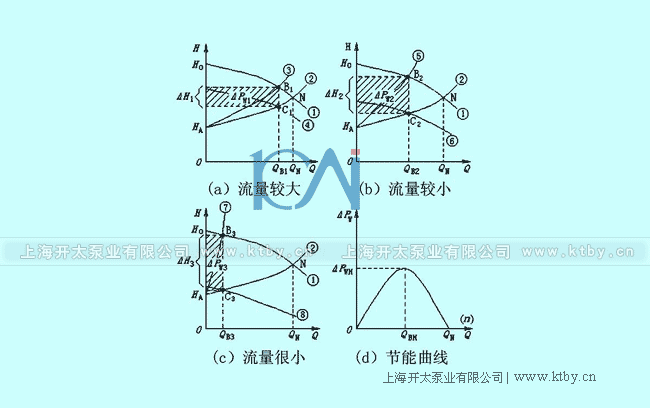
图10 节能与流量的关系
图10(a)是流量较大时的情形。这时,流量与额定流量相差不多,故节约的功率较少;
图10(b)是流量进一步减小后的情形。这时,流量比额定流量小得多,故节约的功率较多;
图10(c)是流量很小时的情形。这时,因为整个系统消耗的流体功率本就不多,故能够节约的功率也就有限。
在两个极端情况下,即流量等于额定流量(q=qn),以及流量等于0(q=0)时,节约功率都等于0。所以,节约功率与流量的关系曲线如图10 (d)所示,呈两边小,中间大的形状。
在实际应用中,水泵的工作频率一般都不低于25hz,所以,频率越低,节能效果越好的说法是没有实际意义的。
2.2.2轴功率节能效果的规律
(1) 调节转速时的功率曲线
在调节转速时,轴功率由式(5)计算,变化规律如图11中之曲线①所示。因为水泵的流量是与转速成正比的,所以,图11的横坐标既可以 表示流量,也可以表示转速。
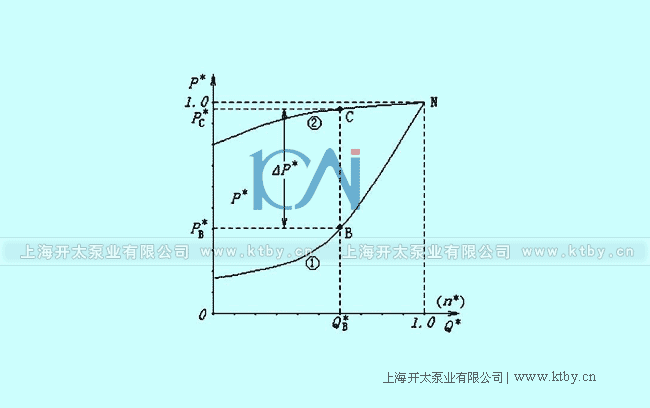
图11 轴功率与流量的关系
此外,为了方便起见,图中各量都用相对值。
流量的相对值:
q* (8)
式中,q*—流量的相对值;
q—实际流量,m3/min;
qn—额定流量,m3/min。
转速的相对值:
n* (9)
式中, n*—转速的相对值;
n—实际转速,r/min;
nn—额定转速,r/min。
功率的相对值:
p* (10)
式中,p*—功率的相对值;
p—实际功率,kw;
pn—额定功率,kw。
(2) 调节阀门开度时的功率曲线
通过调节阀门开度来调节流量时,电动机是以全速运行的。当阀门开度减小时,电动机的轴功率虽然也有所减小,但减小不多。其功率和 流量的关系如图11中之曲线②所示。
(3) 节能规律
假设实际流量的相对值是qb*,则当通过降低转速来实现时,消耗功率的相对值是pb*;而通过关小阀门开度来实现时,消耗功率的相对值 是pc*。两者相比较,调节转速的方法可节约功率δp*。
由图可知,在流量(从而转速)越小,节约的功率是越大的。这个规律与流体功率的节能规律明显地不一致。
2.2.3 水泵的效率
图11表明,轴功率的节能效果基本上是流量越小,节能越多。这和图10(d)所示的流体功率节能效果的变化规律明显地不一致。
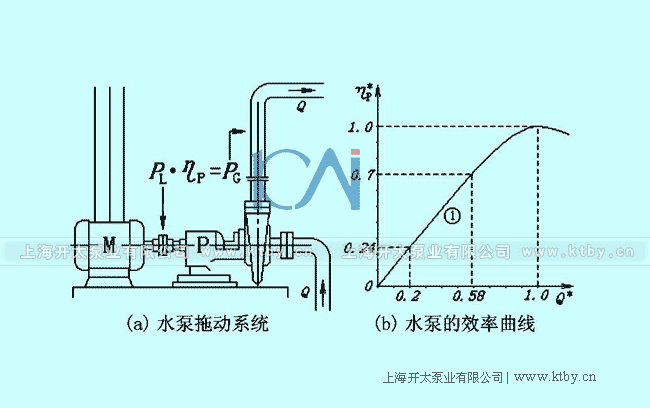
图12 水泵的效率
为什么会产生这样的矛盾呢?如图12,流体功率和轴功率之间的差异在于水泵的效率:
pg=pl·ηp (11)
式中,pg—流体功率,kw;
pl—轴功率,kw;
ηp—水泵的效率。
据有关资料介绍,水泵工作效率相对值ηp*的近似计算公式如下:
ηp*=c1()-c2 (12)
式中,ηp*—水泵效率的相对值;
q*—流量的相对值;
n*—转速的相对值;
c1、c2—常数,由制造厂家提供。c1与c2之间,通常遵循如下规律:
c1-c2=1 (13)
(1) 调节转速时的水泵效率
由于在阀门开度不变的情况下,流量q*和转速n*是成正比的:q*/n*=1
故:ηp*=1
所以,采用转速控制方式时,水泵的工作效率总是处于最佳状态。
(2) 调节阀门开度时的水泵效率
当通过关小阀门来调节流量q*时,由于转速不变,n*=1,故比值 q*/n*=q*。代入式(12,得:
ηp*=c1/q*-c2q*2 (14)
所得效率曲线如图12(b)所示。由图知,采用调节阀门开度来调节流量时,水泵的效率将随着流量的减小而减小。
2.2.4 结论
当采用不同的控制方式来调节流量时,水泵的效率是不一样的。所以,流体功率(水泵的输出功率)的节能效果不能等同于电动机轴功率( 水泵的输入功率)的节能效果。
3 电动机的输入功率
3.1 影响电动机效率的因素
3.1.1 电动机低频运行的主要问题
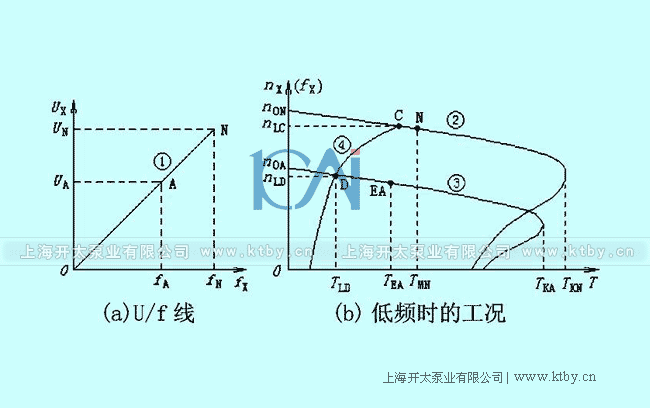
图13 u/f=c的工况
由式(2),离心式水泵在低速运行时,负载转矩下降较多,如图13(b)中之曲线④所示。而电动机的有效转矩则减小较少,形成“大 马拉小车”的状态。
图13所示是u/f比为常数(如图a之曲线①所示)时的情形。
在额定转速(fx=fn)下,电动机的机械特性如图(b)中之曲线②所示,额定转矩为tmn,与负载的额定转矩相差不大;
当频率下降为fa时,电动机的机械特性如曲线③所示。其有效转矩减小为tea,但负载转矩却下降得更多,为tld。十分明显,“大 马拉小车”的现象是十分严重的。
3.1.2 电动机中的几个重要关系
(1) 异步电动机的转矩
异步电动机的转矩由转子电流和磁通相互作用产生,计算公式如下:
tm=kti2’φcosφ2 (15)
式中,tm—电动机的电磁转矩,n·m;
kt—转矩系数;
i2’— 折算后的转子电流,a;
φ—电动机的主磁通,wb;
cosφ2—转子侧的功率因数。
(2) 异步电动机的输入电流
根据磁动势平衡的原理,异步电动机的定子电流(输入电流)由转子电流和励磁电流合成:
1=-2’+0 (16)
式中,1—定子电流的复数值,a;
0—励磁电流的复数值,a。
因为2′是直接用来产生电磁转矩的,所以,式(16)中的2′也可以叫作转矩分量。又因为电动机的电磁转矩总是要和负载转矩 相平衡的,所以,2′的大小是随负载而变的。
(3) 励磁电流与磁通
电动机在工频运行时,由于电压基本上是稳定的,所以磁通大小和励磁电流也是基本稳定的。但在变频运行时,由于u/f比可以任意预置 ,磁通大小的变化幅度较大。如预置不当,磁路极易饱和,励磁电流的变化也较大。如图14(a)所示是正常状态时的磁通和励磁电流,图(b)所 示是磁路饱和时的磁通和励磁电流。由图知,励磁电流的波形将严重畸变,并可能产生很高的峰值。
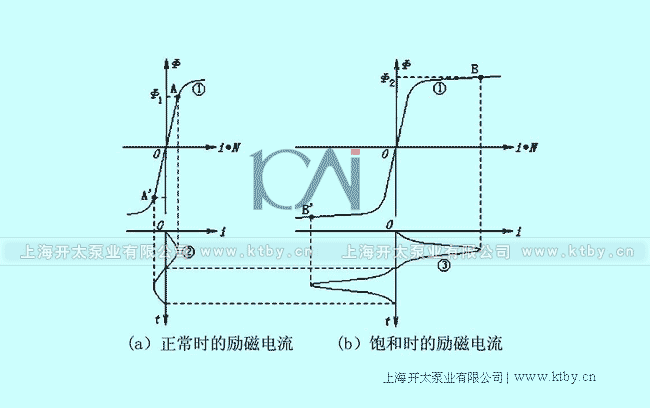
图14 电动机的励磁电流
(4) 电压与磁通
电动机定子绕组的等效电路如图15所示。其电动势平衡方程是:
1=-1+1r1+j 1x1 (17)
式中, 1—定子相电压,v;
1—定子绕组的反电动势,v;
r1—定子绕组的电阻,ω;
x1—定子绕组的漏磁电抗,ω。
反电动势的大小与电流频率和磁通大小的乘积成正比:
e1=kefφ (18)
式中,ke—电势系数。
所以,磁通的大小正比于反电动势和频率之比:
φ=kφ (19)
式中,kφ—磁通系数。
由式(17)知,在频率一定的前提下,反电动势的大小取决于电压u(即u/f比)和负载的轻重(由此而决定了1r1+j 1x1)。
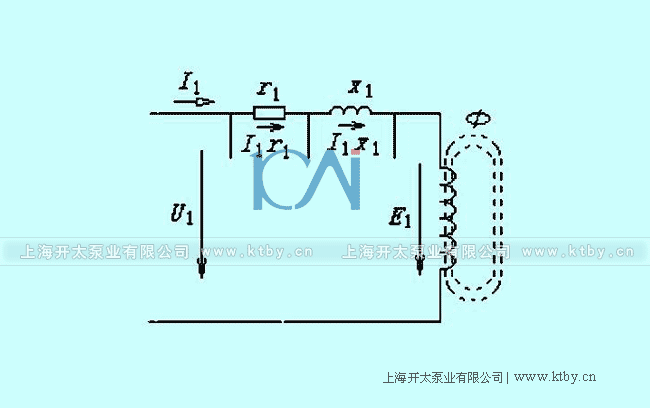
图15 定子绕组的等效电路
3.1.3 电压与电流的关系曲线
(1) 电压偏低
电压偏低,磁通必然减小,但在磁路不饱和的情况下,励磁电流的变化不大。但磁通的减小必然使电磁转矩也减小,转速下降,转子电流 (电流的转矩分量i2’)增大,定子电流也增大,如图16(a)中的a’点所示。
这种情况主要见于重载运行时。就是说,在重载运行时,电压越低,则电流越大。
(2) 电压偏高
电压偏高,磁通必然也增大,导致磁路饱和,励磁电流的峰值将大幅增加,变频器的输出电流也增大,如图16(a)中之a”点。水泵 的变频运行基本上都属于这种情况。
这说明,电动机在运行时,是存在着一个最佳工作点的,如图16(a)中之a点。在最佳工作点运行时,电动机的工作电流最小,也最节能。 负载改变,电动机的工作状态也改变,最佳工作点也随之转移,如图16(b)中之a、b、c点所示。
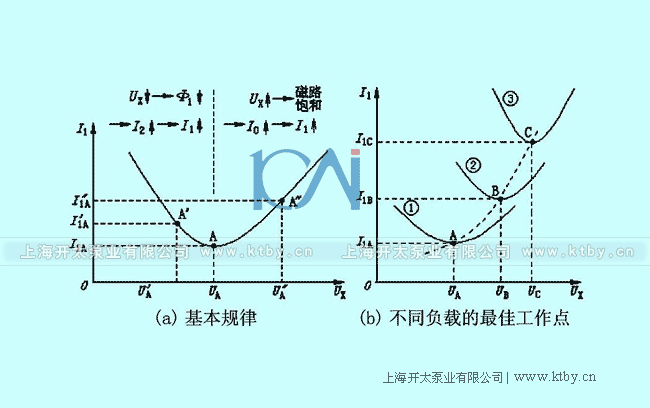
图16 电动机的电流-电压曲线
3.2 正确预置变频器功能的意义
3.2.1 变频器的节能功能
(1) 自动搜索功能
变频器中,u/f比可以任意预置的特点,换一个角度看,则:变频器在某一个工作频率下,其输出电压是可以任意调节的。
部分变频器,如日本的超能士变频器,具有自动搜索最佳工作点的功能,其节能效果明显地优于其他变频器。
(2) 低减u/f比功能
即在低频运行时,减小u/f比,使u/f线如图17(a)中之曲线①’(通常称为低减u/f线)所示。由图知,当频率为fa时,电压下降为 ua’。
降低电压后的机械特性如图17(b)中之③所示,电动机的临界转速nka不变,但临界转矩减小较多。这时,电动机的有效转矩减小为 tea’,和负载的阻转矩tld之间的差距减小了,缓解了“大马拉小车”的问题。但这种方法,不大可能使电动机工作在最佳工 作点。
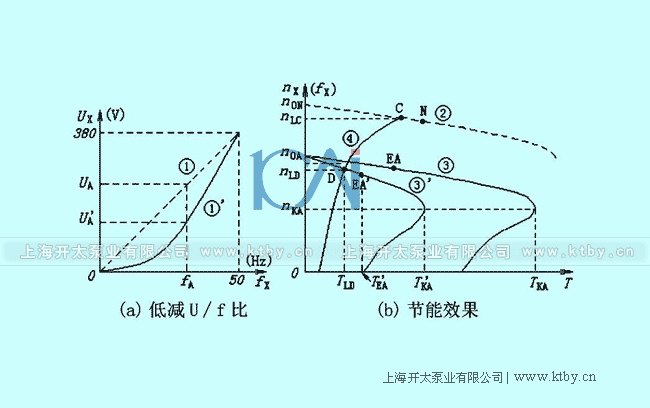
图17 低减压频比的节能原理
4 结束语
以上论述,可以归结如下:
(1) 讨论水泵的节能效果,归根到底,必须着眼于电功率的节能。
(2) 流体功率节能分析的基础,是比较两种不同控制方式的结果,节能效果与克服静扬程所需要的广义空耗密切相关。
(3) 电动机轴功率的节能效果与流体功率的节能效果差异较大,这是由于水泵在不同控制方式下的效率差异较大的原因。
(4) 在变频调速的情况下,电功率的节能效果还和变频器的功能预置有关。